Ранее был сделан прототип анемометра из одного ультразвукового дальномера HC-SR04. Он умел рассчитывать проекцию скорости ветра на линию между приемником и передатчиком. Для получения вектора скорости ветра на плоскости (2D) требуется вторая координата, которую мы получим, если добавим второй датчик перпендикулярно первому. В этом случае можно закрепить анемометр стационарно — отпадает необходимость использовать флюгер и как-то организовывать подвижные контакты.
Первая версия
Сказано — сделано, причем основательно.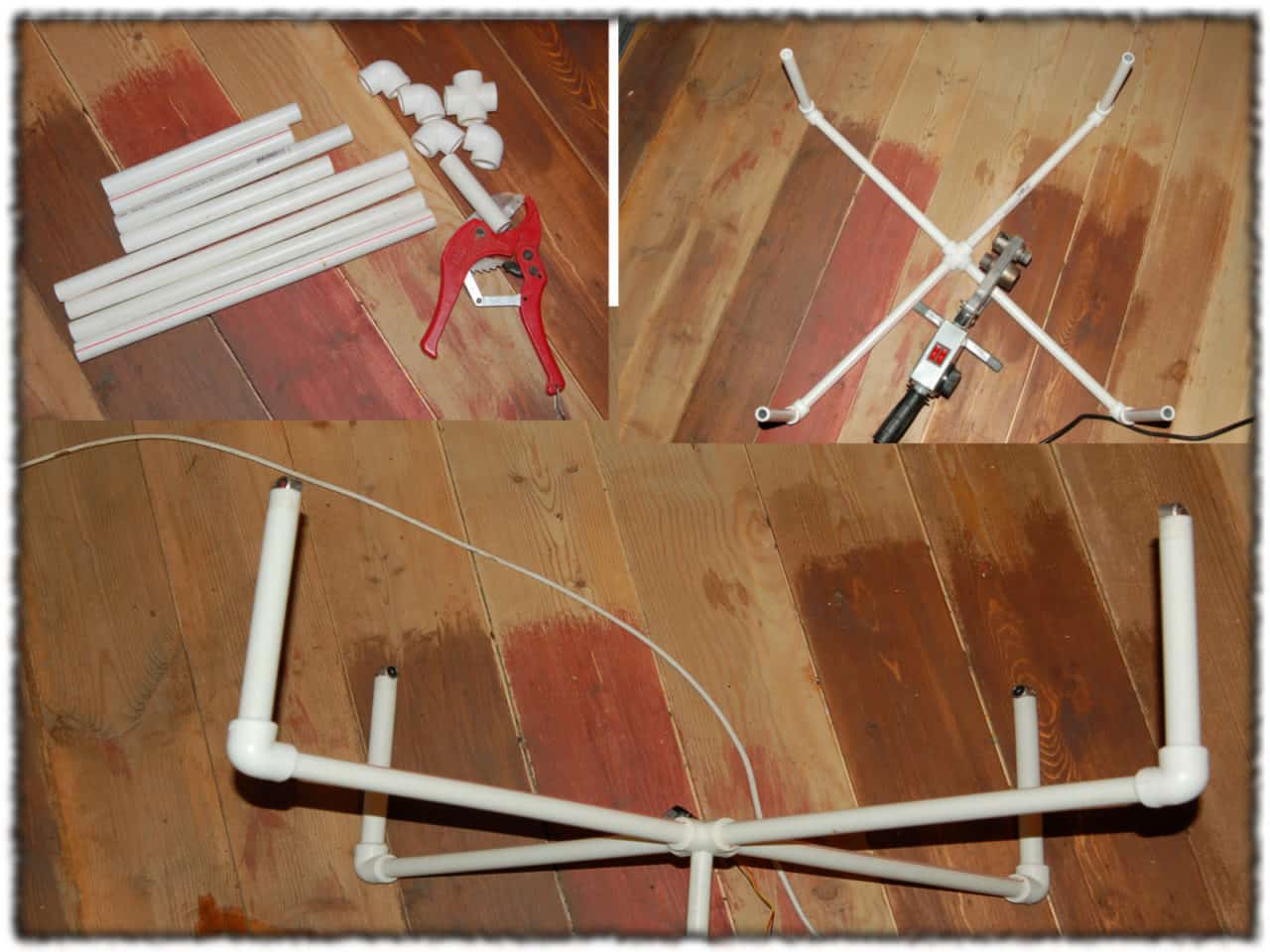
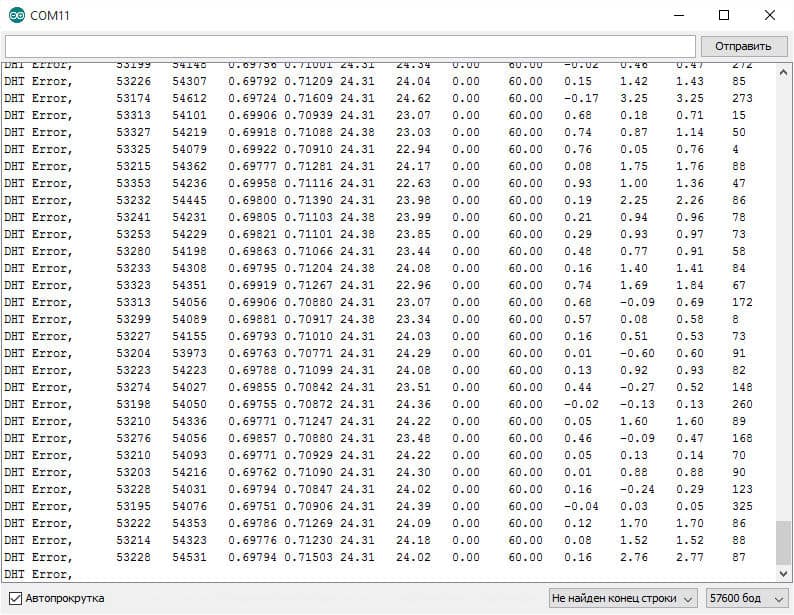
Из обрезков полипропиленовых труб сварил крестовину. Все датчики отпаял и удлинил проводами, которые проложил внутри труб. Расстояние между датчиками получилось 70 см.
Код программы такой.
#include <dht.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#define Trig 4
#define Echo 2
#define Trig2 8
#define Echo2 12
#define ONE_WIRE_BUS 7
#define Steps
dht DHT;
#define DHT21_PIN 0
static const float defDist = .6985; // m
static const float defDist2 = .713; // m
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
void setup()
{
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(Trig2, OUTPUT);
pinMode(Echo2, INPUT);
Serial.begin(57600);
// Start up the library
sensors.begin();
Serial.println("X Distance Tds18820 Tcalc Tdht Hum V");
}
unsigned long impulseTime=0;
void loop()
{
// READ DATA
//Serial.print("DHT21, \t");
int chk = DHT.read21(DHT21_PIN);
float DHTtemp = 10;
float DHThum = 50;
switch (chk)
{
case DHTLIB_OK:
// Serial.print("OK,\t");
DHTtemp =DHT.temperature;
DHThum = DHT.humidity;
break;
default:
Serial.print("DHT Error,\t");
break;
}
// DISPLAY DATA
// Serial.print(DHThum, 1);
// Serial.print(",\t");
//Serial.println(DHTtemp, 1);
sensors.requestTemperatures(); // Send the command to get temperatures DS18820
float dist = 0;
float dist2 = 0;
float temp = sensors.getTempCByIndex(0); //DHTtemp;
unsigned long impulseTime=0;
unsigned long impulseTime2=0;
int N=250;
for (int i = 0; i <N; i++) {
digitalWrite(Trig, HIGH); delayMicroseconds(10); digitalWrite(Trig, LOW);
impulseTime +=pulseIn(Echo, HIGH); delay(50);
digitalWrite(Trig2, HIGH); delayMicroseconds(10); digitalWrite(Trig2, LOW);
impulseTime2 +=pulseIn(Echo2, HIGH); delay(50);
}
//float P = 101325;
float P = 761 * 133.3;
float M = (28.95-10.934*DHT.humidity/100*(133.3*4.579*exp(17.14*temp/(235.3+temp)))/P)/1000;
float R= 8.31447; float X = 1.4 * R/M ; //X = 287;
float c = sqrt( X *(temp+273.15));
dist = impulseTime * c / 1e6 /N;
dist2 = impulseTime2 * c / 1e6 /N;
float Speed_of_sound = defDist*N/impulseTime * 1e6;
float Speed_of_sound2 = defDist2*N/impulseTime2 * 1e6;
float Tcalc = sq(Speed_of_sound)/X - 273.15;
float v = c- Speed_of_sound;
float v2 = c- Speed_of_sound2; float v3 = sqrt(sq(v) + sq(v2));
int wd = int(atan(-v/v2)*180/3.1416);
if (v>0) {wd+=90;} else {wd+=270;}
//Serial.println("X Distance Tds18820 Tcalc Tdht Hum V");
//Serial.println(String(impulseTime) + char(9) + String(impulseTime2));
Serial.println(String(impulseTime) + char(9) + String(impulseTime2) + char(9) + String(dist, 5) + char(9) + String(dist2, 5) + char(9) + String(temp) + char(9) + String(Tcalc) + char(9) + String(DHTtemp)+ char(9) + String(DHThum) + char(9) + String(v) + char(9) + String(v2) + char(9) + String(v3) + char(9) + String(wd));
}
Два последних числа дают искомую горизонтальную скорость и направление ветра. Направление рассчитывается в виде азимута к направлению на север и дается в градусах. Вращение по часовой стрелке.
Увы, результаты меня разочаровали.
При усреднении в 25 измерений, показания в спокойном воздухе прыгают в среднем до 1.5 м/с, при этом измерения выдаются примерно раз в сек. Если усреднить в 10 раз больше показаний ситуация улучшается, но кардинально проблему не решает. К тому же судя по графику скоростей в двух осях, одна пара датчиков фонит существенно больше другой.  Скорее всего дело в проводах, которыми я удлинил датчики. Придется переделывать.
Скорее всего дело в проводах, которыми я удлинил датчики. Придется переделывать.
Вторая версия
Есть еще одна причина все переделать. Как отмечалось в первой теоретической части, скорость звука изменится на 1 м/с при изменении температуры примерно на 1.5 °С. Погрешности измерений по обоим осям складываются. Нужно понимать, что порывы теплого или холодного воздуха могут существенно исказить показания такого анемометра. Нет смысла в показаниях 4 м/с при легком дуновении теплого ветерка.  Из диаграммы натурного эксперимента видно, что даже медленное изменение температуры вызывает дрейф измеренной скорости, а быстрое изменение температуры на 1 градус скачком поменяло измеренную скорость ветра на 1.5 м/с, в то время как датчик температуры медленно отрабатывает это изменение. Важно заметить, что эксперимент этот проходил прямо у меня на столе и изменение температуры было естественным — я ничего не трогал и искусственно ничего не нагревал.
Из диаграммы натурного эксперимента видно, что даже медленное изменение температуры вызывает дрейф измеренной скорости, а быстрое изменение температуры на 1 градус скачком поменяло измеренную скорость ветра на 1.5 м/с, в то время как датчик температуры медленно отрабатывает это изменение. Важно заметить, что эксперимент этот проходил прямо у меня на столе и изменение температуры было естественным — я ничего не трогал и искусственно ничего не нагревал.
И тут на помощь приходит тот же принцип, что и при измерении расстояния. Если помним, датчики у оригинального HC-SR04 расположены вместе, поэтому результаты не зависят от наличия ветра. Если измерить скорость звука на известном расстоянии сначала в одном направлении, а затем в другом, то разница этих двух показаний, деленная пополам и будет искомой скоростью ветра в проекции на эту ось. При этом, изменение температуры в диапазоне ±25°С дает погрешность ±4%, что абсолютно не критично и мы можем обойтись вообще без термометра. Да и зачем нам термометр? Если мы знаем время прохождения сигнала в обоих направлениях, то по формулам из прошлой статьи мы легко вычислим температуру, а значит сможем уточнить скорость ветра.
Есть лишь одна маленькая загвоздка — придется использовать два HC-SR04 на одной оси. В промышленных образцах датчики попеременно выполняют роль приемника и передатчика. В нашем случае для этого придется подключить пищалки напрямую к arduino и программно генерировать 8 импульсов 40 кГц на одной, после чего вычленять их из другой. Зная про определенные сложности на этом пути, мне представляется проще купить еще 2 датчика по 55 рублей и попытаться обойтись малой кровью. Этим я займусь в следующий раз. А пока на двух датчиках сделаю измерение скорости ветра по одной оси и измерение температуры в такой конфигурации. Главная проблема здесь убрать помехи, которые дают такой большой разброс показаний в спокойном воздухе.
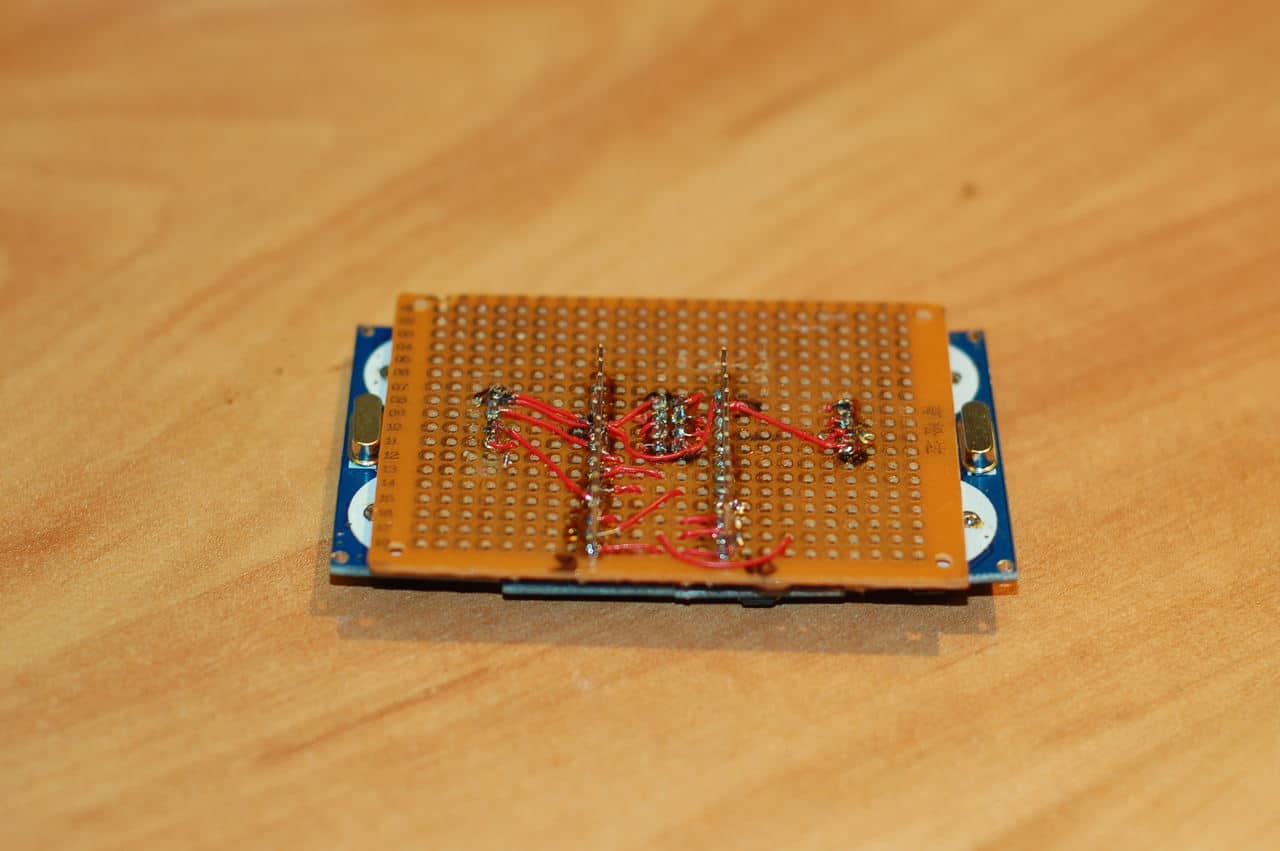
Конструкция
Вооружившись паяльником конструкция была беспощадно распаяна на составляющие. Новую версию решил не делать так основательно, а зря. Никогда не угадаешь, где найдешь, где потеряешь. Получилось как-то так.

Во-первых, приемник расположил как можно ближе к плате, а передатчик удалил всего лишь на 20 см. Второй комплект перевернул на 180 градусов и пищалки скрепил попарно изолентой. Чем точнее соблюсти соосность обоих пар датчиков, тем лучше. В идеале мы должны получить абсолютно идентичные показания скорости прохождения сигнала в обоих направлениях в спокойном воздухе. Натурные испытания подтвердили нашу теорию. В такой конфигурации получается мало помех и весьма точные показания независимо от температуры, что подтверждается графиком ниже.
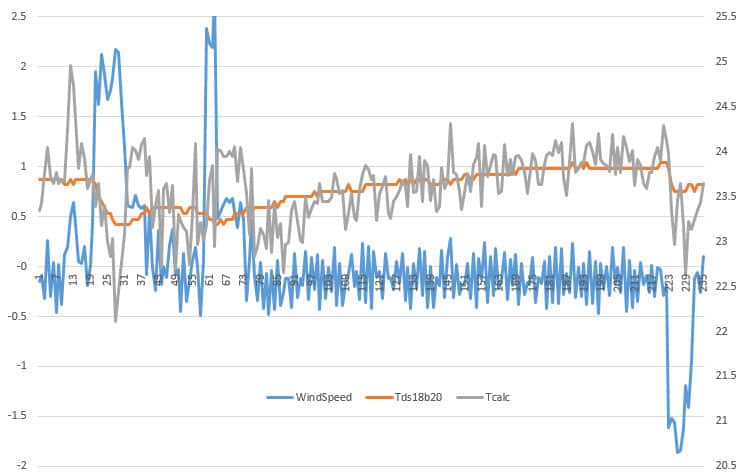
Вначале я пробовал просто дуть по направлению от синей пары к черной. Моих легких явно недостаточно. Но любопытный факт — воздух в легких успел нагреться на 1°, что раньше вызвало бы скачок скорости на 1.5 м/с, т.к. DS18B20 просто ничего не заметил. Отметим, что мои легкие способны дать всего лишь 0.5 м/с. Дальше я включил большой напольный вентилятор и направил все также от синего к черному. Видно как пошел более прохладный воздух из глубины комнаты и даже DS18B20 начал отрабатывать это снижение, но теперь его значения не используются для расчета скорости. Сделал открытие, что мой вентилятор дует со скоростью около 2 м/с. Дальше в течение паузы видим постепенное увеличение температуры и отличную корреляцию между рассчитанной и измеренной температурой. В конце поставил вентилятор с другой стороны и получил 2 м/с в обратном направлении с падением температуры. Ура, товарищи, это работает!
Программа расчета скорости ветра
#include <dht.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#define Trig 4 // HC-SR04 №1
#define Echo 2
#define Trig2 8 // HC-SR04 №2
#define Echo2 12
#define ONE_WIRE_BUS 7 // DS18B20
#define Steps
dht DHT;
#define DHT21_PIN 0 // DHT21
static const float defDist = .2121; // m
static const float defDist2 = .2121; // m
float Tcalc = 0;
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
void setup()
{
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(Trig2, OUTPUT);
pinMode(Echo2, INPUT);
Serial.begin(57600);
// Start up the library
sensors.begin();
Serial.println("X Distance Tds18820 Tcalc Tdht Hum V");
}
unsigned long impulseTime=0;
void loop()
{
float temp = 0;
float DHTtemp = 0;
float DHThum = 50;
// READ DHT DATA
int chk = DHT.read21(DHT21_PIN);
if (chk == DHTLIB_OK)
{
DHTtemp =DHT.temperature;
DHThum = DHT.humidity;
}
if (sensors.getDeviceCount() > 0)
{
sensors.requestTemperatures(); // Send the command to get temperatures DS18820
temp = sensors.getTempCByIndex(0); //DHTtemp;
}
float dist = 0;
float dist2 = 0;
unsigned long impulseTime=0;
unsigned long impulseTime2=0;
int N=50;
for (int i = 0; i <N; i++)
{
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
impulseTime +=pulseIn(Echo, HIGH);
delay(50);
digitalWrite(Trig2, HIGH);
delayMicroseconds(10);
digitalWrite(Trig2, LOW);
impulseTime2 +=pulseIn(Echo2, HIGH);
delay(50);
}
//float P = 101325;
float P = 761 * 133.3;
float M = (28.95-10.934*DHThum/100*(133.3*4.579*exp(17.14*Tcalc/(235.3+Tcalc)))/P)/1000; //M = 0.02895;
float R= 8.31447;
float X = 1.4 * R/M ;
Tcalc = sq((defDist+defDist2)*N/(impulseTime+impulseTime2) * 1e6)/X - 273.15;
float c = sqrt( X *(Tcalc+273.15));
dist = impulseTime * c / 1e6 /N;
dist2 = impulseTime2 * c / 1e6 /N;
float Speed_of_sound = defDist*N/impulseTime * 1e6;
float Speed_of_sound2 = defDist2*N/impulseTime2 * 1e6;
float v = (Speed_of_sound-Speed_of_sound2)/2;
//float v2 = c- Speed_of_sound2;
//float v3 = sqrt(sq(v) + sq(v2));
//int wd = int(atan(-v/v2)*180/3.1416);
//if (v>0) {wd+=90;} else {wd+=270;}
Serial.println(String(impulseTime) + char(9) + String(impulseTime2) + char(9) + String(dist, 5) + char(9) + String(dist2, 5) + char(9)
+ String(temp) + char(9) + String(Tcalc) + char(9) + String(DHTtemp)+ char(9) + String(DHThum)+ char(9) + String(M,5) + char(9) + String(v));
}
Программа будет работать и без датчиков DHT-21 и DS18B20. DS18B20 для вычислений в этом коде нигде не задействован — только выводится в терминал как эталон. Без датчика влажности температура будет рассчитываться как для воздуха с 50% влажностью. На практике это вносит очень маленькую погрешность. На измерения скорости ветра эти датчики вообще не оказывают никакого влияния.
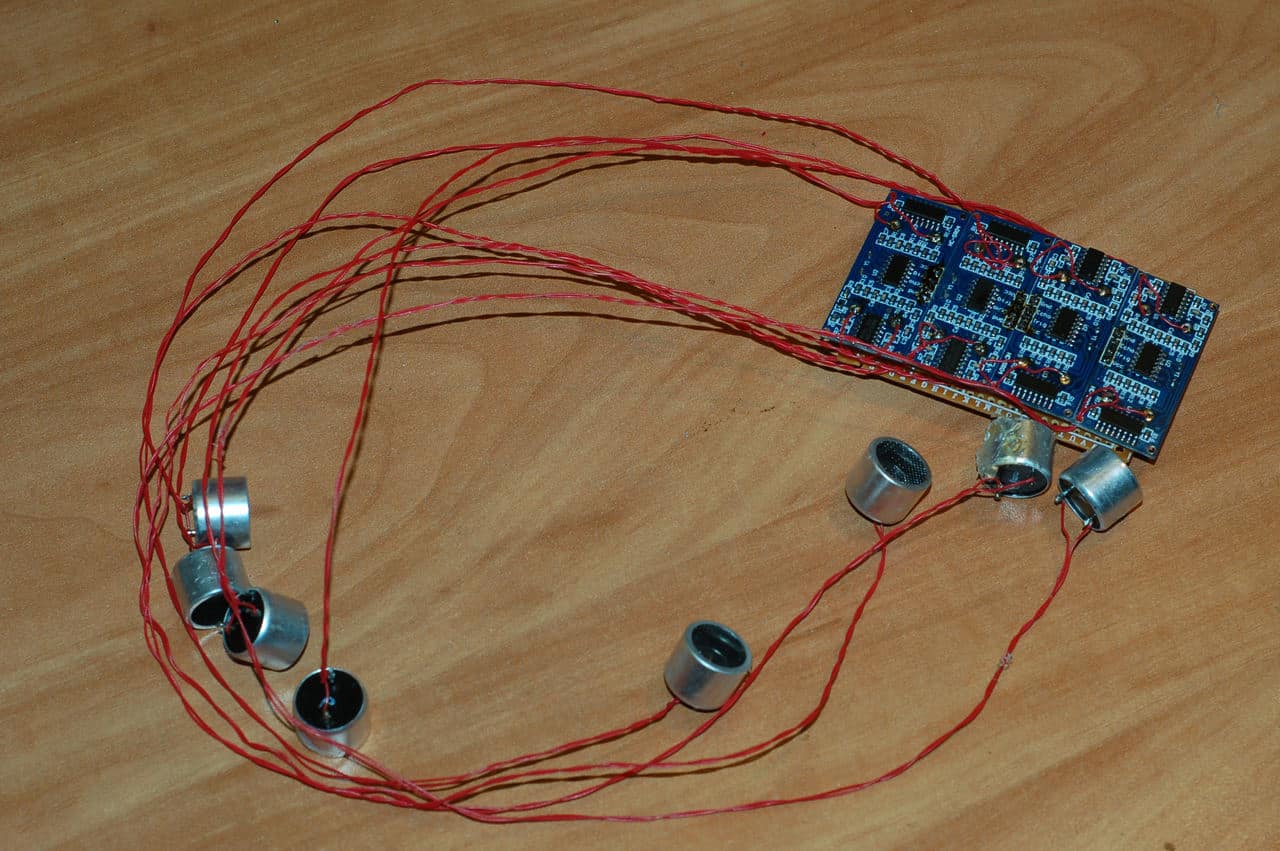
Собственно это все что можно выжать из двух HC-SR04. Для получения вектора скорости ветра на плоскости нужно добавить еще 2 датчика перпендикулярно первым и по формулам первой версии получить полную скорость и направление. Этим займусь как только приедут заказанные дополнительные датчики.
P.S.
Датчики давно приехали, конструкцию переделывал еще 2 раза и в конце концов он заработал как надо, но до крыши этот ультразвуковой анемометр так и не доехал, поэтому до сих пор продолжения и не написал, хотя идея рабочая.
P.P.S. 2018
По многочисленным просьбам выкладываю итоговый скетч, который не требует никаких библиотек (кроме стандартной EEPROM) и работает с 4 датчиками. Код со всякими вкусностями типа встроенной калибровки и сохранением калибровочных значений в энергонезависимую память. И самое главное. Описанная выше проблема с погрешностями по одной из осей была связана не с проводами, а с работающими в одной комнате с датчиками импульсными блоками питания компьютера, монитора и т.п. (их схема преобразования работает на близкой частоте 40 кГц). Я остановился на проблеме выноса датчика на улицу подальше от помех (с передачей данных по блютус). В остальном это работает. Это версия для распаянных датчиков, но есть способ не распаивать. Если вернусь к проекту — реализую.
Для этого кода неважно какое расстояние между датчиками. Нужно поместить устройство в безветренное пространство (и без импульсных помех) и через терминал несколько раз отдать 2 команды:
t21.5
u
Первая — текущая температура по эталонному термометру (любой уличный), вторая — говорит контроллеру что сейчас скорость ветра 0. Согласно этим данным он вычислит расстояние между датчиками и запишет их в EEPROM. Все дальнейшие измерения будут отталкиваться от этих значений.
// WindSpeed v.4 - Анемометр
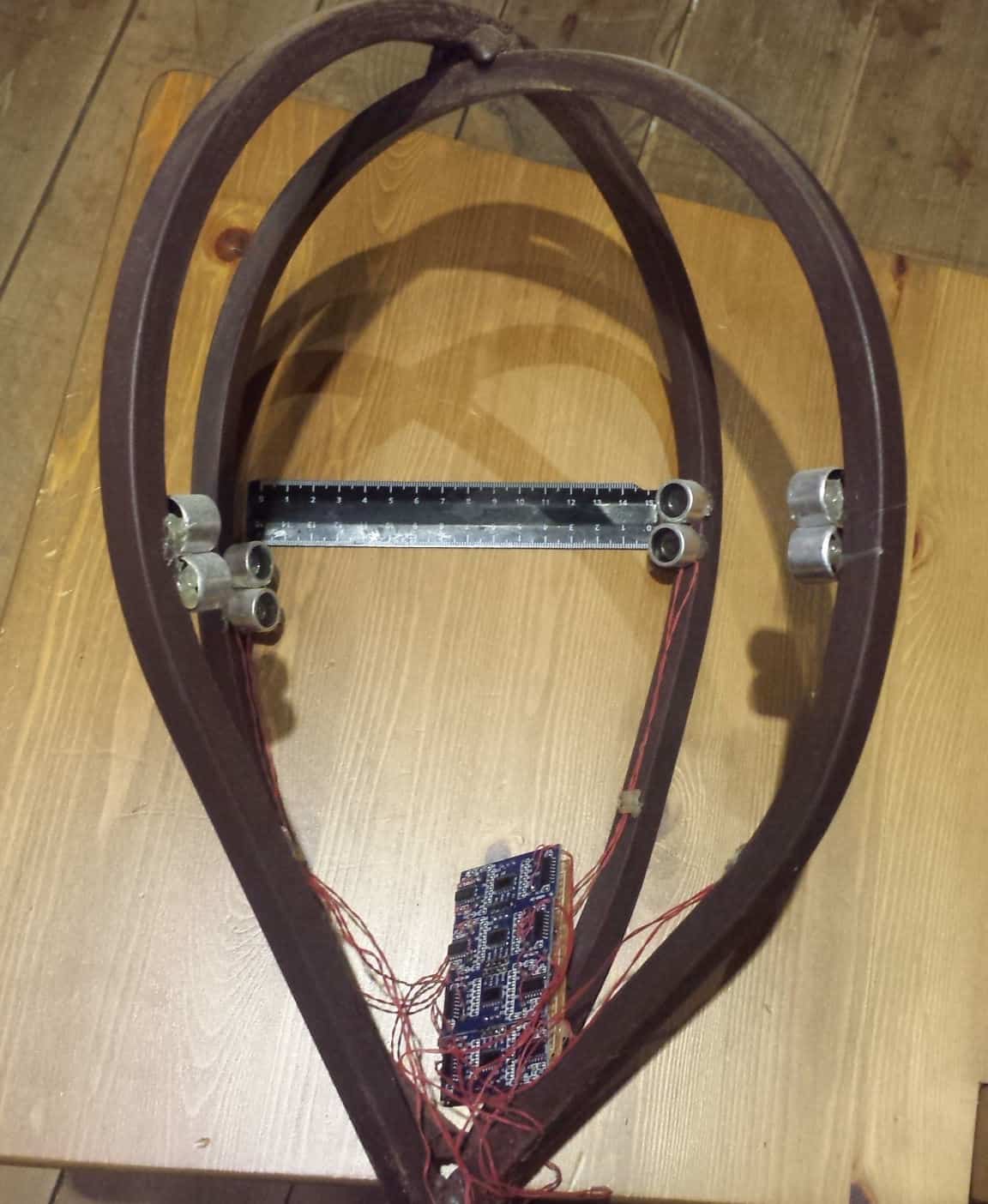
// Copyright Evgeny Istomin gena@regimov.net, blog.regimov.net
// Используются 4 датчика HC-SR04. Приемник и передатчик разнесены на противоположные концы крестовины
// На схеме изображено положение приемников для правильного расчета направления и силы ветра
// HC-SR04 №1
// Север (0 гр)
// o
// |
// |
// HC-SR04 №2 o-------|---------o HC-SR04 №4
// Запад (270гр) | Восток (90 гр)
// |
// o
// HC-SR04 №3
// Юг (180 гр)
// при выборе материала крестовины руководствоваться http://temperatures.ru/pages/temperaturnyi_koefficient_lineinogo_rasshireniya
// лучший выбор материала - труба инвар 36H, но и обычное железо вполне годится :-)
#define DEFINE_DISTANCE 0.22 // примерное расстояние между датчиками, измеренное линейкой, в метрах.
#define MES_PAUSE 90 // Пауза между измерениями для затухания отражений. В реальности нужно не менее 1, мс.
#define MES_AVERAGE 8 // сколько измерений усреднять для температуры.
#define PRINT_PERIOD 500 // период вывода измерений в терминал, ms
#include <EEPROM.h>
#define FALSE 0
#define TRUE 1
#define Echo1 2
#define Echo2 3
#define Echo3 8
#define Echo4 5
#define Trig1 6 // HC-SR04 №1
#define Trig2 7 // HC-SR04 №2
#define Trig3 4 // HC-SR04 №3
#define Trig4 9 // HC-SR04 №4
#define Pow1 10
#define Pow2 11
#define Pow3 12
#define Pow4 13
#define T_ABS 273.15 // температура абсолютного нуля https://ru.wikipedia.org/wiki/%D0%90%D0%B1%D1%81%D0%BE%D0%BB%D1%8E%D1%82%D0%BD%D1%8B%D0%B9_%D0%BD%D1%83%D0%BB%D1%8C_%D1%82%D0%B5%D0%BC%D0%BF%D0%B5%D1%80%D0%B0%D1%82%D1%83%D1%80%D1%8B
#define PRINT_LOOP PRINT_PERIOD/(4*(MES_PAUSE)) // сколько полных циклов пропустить перед выводом измерений в терминал
float defDist1 = DEFINE_DISTANCE;
float defDist3 = DEFINE_DISTANCE;
float defDist2 = DEFINE_DISTANCE;
float defDist4 = DEFINE_DISTANCE;
float Tcalc = 0; // температура воздуха (расчетная)
const float DHThum = 50; // % влажности
float M = 0.02895; // молярная масса кг/моль https://ru.wikipedia.org/wiki/%D0%9C%D0%BE%D0%BB%D1%8F%D1%80%D0%BD%D0%B0%D1%8F_%D0%BC%D0%B0%D1%81%D1%81%D0%B0
const float R = 8.31447; // Универса́льная га́зовая постоя́нная Дж/(моль*К) https://ru.wikipedia.org/wiki/%D0%A3%D0%BD%D0%B8%D0%B2%D0%B5%D1%80%D1%81%D0%B0%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%B3%D0%B0%D0%B7%D0%BE%D0%B2%D0%B0%D1%8F_%D0%BF%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BD%D0%BD%D0%B0%D1%8F
const float P = 761 * 133.3;// давление в Па. 101325 на уровне моря
float X = 1.4 * R / M ;
float c = sqrt( X * (Tcalc + T_ABS)); // скорость звука м/с https://ru.wikipedia.org/wiki/%D0%A1%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C_%D0%B7%D0%B2%D1%83%D0%BA%D0%B0
float impulseTime1 = defDist1 / c;
float impulseTime2 = defDist2 / c;
float impulseTime3 = defDist3 / c;
float impulseTime4 = defDist4 / c;
unsigned char count = 0; // счетчик циклов
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
// простой фильтр-усреднитель
float filterA(float y1, float y)
{
return ((MES_AVERAGE - 1) * y1 + y) / MES_AVERAGE;
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
// измеряем задержку прохождения звука между датчиками, сек
float measument(unsigned char Trig, unsigned char Echo, unsigned char Pow) {
float y;
digitalWrite(Pow, HIGH);
delay(MES_PAUSE);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
y = pulseIn(Echo, HIGH);
if (count > PRINT_LOOP) Serial.print(String(y, 0) + char(9));
digitalWrite(Pow, LOW);
return y * 1e-6;
};
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
// запоминаем в flash-памяти расстояния между датчиками
void StoreDefDist()
{
EEPROM.put(0, defDist1);
EEPROM.put(1 * sizeof(float), defDist2);
EEPROM.put(2 * sizeof(float), defDist3);
EEPROM.put(3 * sizeof(float), defDist4);
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
// читаем из flash-памяти расстояния между датчиками
float GetDefDist(int adress)
{
float dd;
EEPROM.get(adress, dd);
if (dd <= 0) dd = DEFINE_DISTANCE;
return dd;
} ///////////////////////////////////////////////////////////////////////////////////////////////////////////////
// расчет скорости звука в зависимости от температуры, давления и влажности
void GetC(float t) {
M = (28.95 - 10.934 * DHThum * 0.01 * (133.3 * 4.579 * exp(17.14 * t / (235.3 + t))) / P) / 1000;
X = 1.4 * R / M ;
c = sqrt( X * (t + T_ABS));
} ///////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() {
pinMode(Pow1, OUTPUT);
pinMode(Pow2, OUTPUT);
pinMode(Pow3, OUTPUT);
pinMode(Pow4, OUTPUT);
pinMode(Trig1, OUTPUT);
pinMode(Trig2, OUTPUT);
pinMode(Trig3, OUTPUT);
pinMode(Trig4, OUTPUT);
pinMode(Echo1, INPUT);
pinMode(Echo2, INPUT);
pinMode(Echo3, INPUT);
pinMode(Echo4, INPUT);
digitalWrite(Pow1, HIGH);
digitalWrite(Pow4, HIGH);
digitalWrite(Pow3, HIGH);
digitalWrite(Pow2, HIGH);
defDist1 = GetDefDist(0); // читаем из flash-памяти расстояния между датчиками
defDist2 = GetDefDist(1 * sizeof(float));
defDist3 = GetDefDist(2 * sizeof(float));
defDist4 = GetDefDist(3 * sizeof(float));
Serial.begin(57600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.println("impT1\timpT3\timpT2\timpT4\tdist1\tdist3\tdist2\tdist4\tTcalc\tv1\tv2\tWD\tv3 " + String(PRINT_LOOP));
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
void loop() {
// период измерений = 1 / ( 4e-3 * (MES_PAUSE + 1))
impulseTime1 = measument(Trig1, Echo1, Pow1);
impulseTime3 = measument(Trig3, Echo3, Pow3);
impulseTime2 = measument(Trig2, Echo2, Pow2);
impulseTime4 = measument(Trig4, Echo4, Pow4);
//if (count > MES_AVERAGE) Serial.print(String(impulseTime1*1e6) + char(9));
Tcalc = filterA(Tcalc, sq((defDist2 + defDist4 + defDist1 + defDist3) /
(impulseTime1 + impulseTime3 + impulseTime2 + impulseTime4) ) / X - T_ABS);
if ((Tcalc > 70) | (Tcalc < -50)) Tcalc = 0;
GetC(Tcalc);
float Speed_of_sound1 = defDist1 / impulseTime1 ;
float Speed_of_sound2 = defDist2 / impulseTime2 ;
float Speed_of_sound3 = defDist3 / impulseTime3 ;
float Speed_of_sound4 = defDist4 / impulseTime4 ;
float v1 = ((Speed_of_sound3 - Speed_of_sound1) / 2);
float v2 = ((Speed_of_sound2 - Speed_of_sound4) / 2);
float v3 = sqrt(sq(v1) + sq(v2));
int wd = int(atan(v2 / v1) * 180 / 3.1416);
if (v1 < 0) {
wd += 180;
} else if (v2 < 0) {
wd += 360;
}
if (count > PRINT_LOOP) {
Serial.println(
String(c, 5) + char(9) + String(Tcalc) + char(9) + String(v1) + char(9)
+ String(v2) + char(9) + String(wd) + char(9) + String(v3)
);
count = 0;
}
while (Serial.available() > 0) {
char inCh = Serial.read();
// установка температуры. формат команды: t21.5
if (inCh == 't') {
String a = Serial.readString();
Tcalc = a.toFloat();
GetC(Tcalc);
}
// u - юстировка (установка на 0). формат команды: u
if ((inCh == 't') | (inCh == 'u')) {
defDist1 = impulseTime1 * c ;
defDist2 = impulseTime2 * c ;
defDist3 = impulseTime3 * c ;
defDist4 = impulseTime4 * c ;
StoreDefDist();
}
}
count++;
}
///////////////////////////////////////////////////////////////////////////////////////////////////////////////








Последнее обновление 31.03.2022 в 12:14
Евгений, может лучше гаджетом для сетей займемся? Нужен датчик наличия нелинейности в нагрузке. Некий шазам. Есть идея иметь автомат, который понимает что включено в доме. Контроль качества для сетей и система контроля за включенными дорашними потребителями. Для сетей более высоких классов — вычисление статических характеристик нагрузок…
Да, Игорь, будет и для энергетики маленькие поделки. Планирую возродить свой старый проект частотомера, а на его основе добить дешёвый WAMS. Давно хочу померить угол между двумя розетками в Москве — это и есть прототип измерения стат-хар-к нагрузки от частоты. Я даже второй GPS уже купил. Что касается твоей идеи, то мой умный дом еще только на 1 ступеньке развития. «умный дом» — это и есть система контроля что включено. Если дать этой системе доступ к онлайн котировкам стоимости эл.эн., то будет энергосистеме счастье в виде ровного графика нагрузки :).
Котировки — это дело далекое, а вот шазам для качества и диагностики оборудования дело архиважное. Дорога вамсам и цифровым подстанциям. Короче все что смарт — то если лезть в синусоиду
Евгений, здравствуйте, очень занимательная статья, но продолжения нет почти год, у вас что то не получилось, или вы остановились на этом этапе?
Была третья версия, когда приехали датчики. Было мало времени и крестовину я сделал тяп-ляп, поэтому появился отраженный сигнал и в целом система не заработала. Нужно переделывать крестовину, а времени пока на это нет. Скорее всего доделаю этой зимой.
Все понятно! Желаю Вам удачи! Если есть возможность, можете скинуть на почту код для варианта с крестовиной, я не продвинутый пользователь, но очень хочется разобраться)
Отправил.
Расскажи для новичка. Где взять библиотеки которые использовал ты
#include
#include
#include
И как правильно их установитьподключить?
А если не переносить свистелки:
Располагаем друг напротив друга 2 платы.
Запускаем от одного и того же импульса.
Только в одном цикле слушаем один, а в следующем — другой.
Они ведь будут видеть первый по времени свист после запуска и думать, что это его собственный сигнал. А на второй они уже не среагируют…
Меньше проводов. Только длину проводов с импульсами запуска нужно сделать одинаковыми…
Ваше мнение?
Хорошая идея. Вполне возможно это будет работать.
Спасибо Вам за столь интересную тему и готовые скетчи!
Автору благодарность за проделанную работу. Меня только смущает, что датчики имеют рабочую температуру 0° С … + 60° С.
Меня тоже смущало, но если видите по фоткам — тестировал зимой и это работало. Но без гарантий конечно.
А как с работой в непогоду: дождь, снег? У меня просто уже год работает метеостанция, но без анемометра. Вот думаю, какой сделать — чашечный или УЗ.
Ставьте чашечный если есть возможность сделать или купить качественный. У меня самодельный 3 раза ломался от сильного ветра. Но ультразвуковой до крыши так и не добрался.
Здравствуйте, а можно немного подробнее схему подключения,хочу повторить анемометр ваш
Здравствуйте,а можно схему подключения более подробно,очень хочется повторить ваше устройство
Особо схемы то и нет. Каждый датчик подключаете к соответствующим пинам ардуины
#define Echo1 2
#define Echo2 3
#define Echo3 8
#define Echo4 5
#define Trig1 6 // HC-SR04 №1
#define Trig2 7 // HC-SR04 №2
#define Trig3 4 // HC-SR04 №3
#define Trig4 9 // HC-SR04 №4
Доброго времени суток
Хочу повторить ваш проект, только перенести его на работающую метеостанцию на малине, не могу скачать скетч ардуины для тестов…
подскажите пожалуйста — реально ли это устройство использовать для измерения скорости ветра в вытяжной шахте?
В трубах и т.п. лучше использовать трубку пито и дифференциальный датчик давления. Либо обычную крыльчатку.
это как то сложно всё 🙂 подумываю обычный кулер от CPU или БП в трубу засунуть и мерять напряжение. мне впринципе не нужны абсолютные значения, а только оценить изменения до и после включения приточки и сравнить с открытыми окнами
Здравствуйте автор!
У вас что то с изображениями в обоих частях статьи про анемометр. Не отображаются.
Вопрос снят. Открылись через VPN.
Гена, добрый день! Подскажите любезно, на ваш взгляд, какой минимальный размер устройства измеряющего скорость ветра в одном направлении можно сделать?
Кубик 10х10 см если делать через отражение.
Генадий, а откуда взята формула ?
M = (28.95 — 10.934 * DHThum * 0.01 * (133.3 * 4.579 * exp(17.14 * t / (235.3 + t))) / P) / 1000;
И можно ли её расшифровать ?
M — молярная масса воздуха выраженная через температуру, влажность и давление. Все константы расписаны в начале кода. А формулу можно вывести отсюда https://ru.wikipedia.org/wiki/%D0%9F%D0%BB%D0%BE%D1%82%D0%BD%D0%BE%D1%81%D1%82%D1%8C_%D0%B2%D0%BE%D0%B7%D0%B4%D1%83%D1%85%D0%B0
Спасибо! Теперь понял откуда что берётся )
Здравствуйте Гена
С проектом «Ультразвуковой анемометр» вы занимались ещё, есть новая версия, или на этом и остановлюсь?
Остановился. Хотя идея рабочая, но на этих дешёвых датчиках стабильных показаний добиться не получилось.
Добрый день.
Заливка HC-SR04 компаундом (герметиком/эпоксидкой или каким-либо иным) для защиты от пыли и влаги скажется на работе устройства?
Не пробовал, но есть специальные электротехнические герметики. Главное сами датчики не залить.