Это внешний датчик истинной воздушной скорости для использования в летных программах. Подключается по блютус. Оптимизировано для скоростей полета параплана, но может использоваться на дельтапланах на скорости до 103 км/ч IAS.
[latexpage]
Теория
Принцип измерения скорости основан на трубке пито.
\[ V = \sqrt{\frac{2*dP}{\rho}}, \] \[ \rho = \frac{M*P}{R*T},\] \[ M = 0.02895 — 0.010934 * RH* \frac{Pn}{P}, \] \[ Pn = k*4.579*\exp(\frac{17.14*t}{235.3+t}) \] где: V — скорость (м/с), dP — дифференциальное давление (Па), P — статическое давление (Па), R — универсальная газовая постоянная 8.31447 (Дж/(моль∙К)), M — молярная масса (кг/м3), RH — относительная влажность (о.е.), Pn — давление насыщенного водяного пара, T — температура насыщенного пара (K), t — температура (градусы), k — переводной коэффициент размерности = 133.3 для Паскалей.
Если применить стандартную плотность rho = 1.225 кг/м3, то можно ограничиться датчиком дифференциального давления и получим индикаторную скорость IAS. Для определения истинной воздушной скорости TAS согласно теории необходимы дополнительно датчик атмосферного давления, датчик температуры и влажности. Причем на скоростях 50 км/ч показания последнего влияют на 0,1 км/ч при изменении влажности на +-50%. Поэтому от датчика влажности можно отказаться. Изменение температуры на 10 градусов меняет скорость на 1 км/ч. Изменение давления на 10 кПа изменяет скорость на 3 км/ч. При точности датчика дифференциального давления в околонулевых значениях 0,1 Па, минимальная измеряемая скорость — 1.5 км/ч. Максимальная измеряемая скорость 103 км/ч при стандартной атмосфере что соответствует верхнему пределу датчика дифференциального давления 500 Па. Чем выше скорость, тем выше точность, т.к. зависимость скорости от разницы давления квадратична. Однако у датчиков дифференциального давления довольно высокая погрешность шкалы — около 3%, т.е. разные экземпляры датчика могут показывать разные значения в пределах 3%. Это погрешность 0,7 км/ч на скоростях 50 км/ч, но она статическая. Есть также точность повторяемости шкалы 0.5%, т.е. при одинаковом давлении показания датчика могут плавать на 0.5%. Это дает 0.13 км/ч погрешности на скоростях 50 км/ч. В целом, все погрешности приемлемы.
Есть другие формулы, результаты расчетов по которым совпадают с приведенными выше с небольшой погрешностью, что в целом подтверждает правильность вычислений.
После упрощений если принять влажность 50% то итоговая формула:
\[ V_{true} = 23.9667 \cdot \sqrt{ \frac{dP \cdot (273.15 + t)}{P — 115.266 \cdot e^{(17.4 \cdot t)/(235.3 + t)}}} \]
Можно еще упростить приняв влажность 0% как при стандартных условиях:
\[ V_{true} = 23.9667 \cdot \sqrt{ \frac{dP \cdot (273.15 + t)}{P} \]
Погрешность из-за влажности на порядок меньше чем погрешность самой трубки Пито, поэтому в авиации влажность не учитывают.
Теоретически вычисленная скорость должна быть скорректирована с учетом свойств инструментальных средств, а именно строением трубки Пито. Необходимо вычислить поправочный коэффициент k.
Приемник воздушного давления
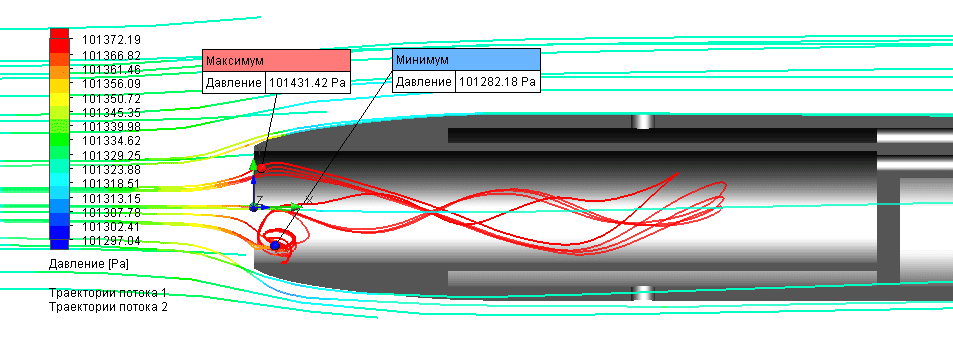
Расчеты показали, что внутренний диаметр трубки имеет большое влияние на коэффициент местного сопротивления, поэтому все маленькие трубки для DIY которые продаются на массмаркет не подходят. На основании многочисленных симуляций и параметрических расчетов была разработана уникальная конструкция трубки Пито. По размерам она гораздо ближе к тем, что применяются на настоящих самолетах. Чем выше скорость тем выше точность до определенного значения. Вот почему важны параметры приемника воздушного давления на низких скоростях. При увеличении скорости давление в статической камере почти не меняется, а в динамической растет. Этот перепад попадает на датчик дифференциального давления, расположенный сразу за трубкой Пито, которая представляет собой единой целое с корпусом и выполнена из жесткого пластика, поэтому сопротивление меньше а точность больше. Итоговый поправочный коэффициент 4%, тогда как у обычных массовых трубок Пито — до 50%.
Электрическая схема
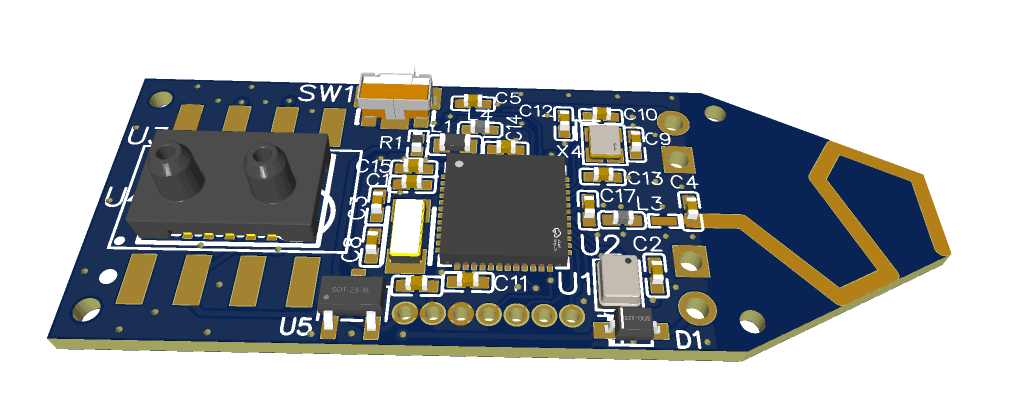
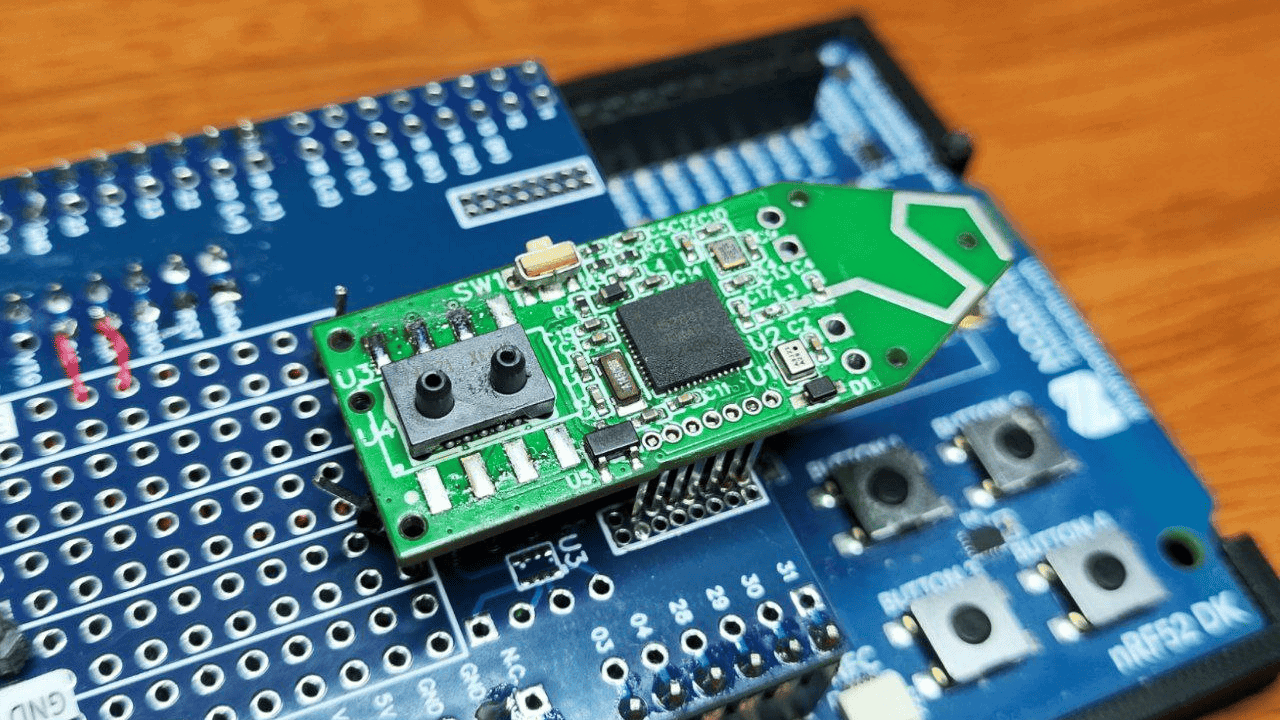
Прибор основан на эффективном микроконтроллере блютус семейства NRF52 от Nordic со встроенным FPU, что делает наши математические расчеты быстрыми. В приборе не используются никакие модули — вся схема собирается на одной плате. На ней расположены датчик дифференциального давления, датчик атмосферного давления и температуры, микроконтроллер, кнопка сброса, разъем питания для литиевого аккумулятора, стабилизатор питания, разъем для солнечной панели, антена блютус.
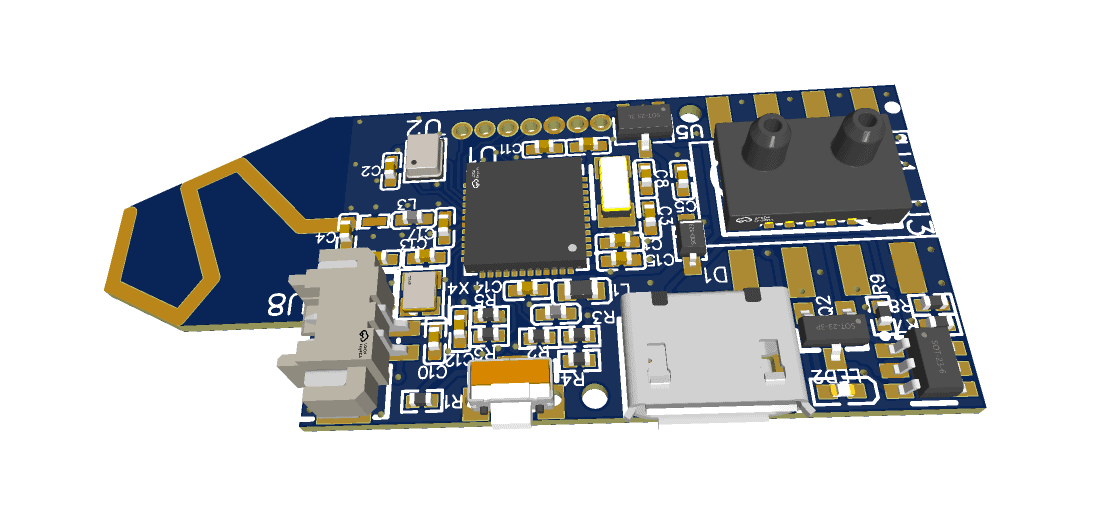
Вторая версия проектировалась со схемой зарядки от USB type C. А третья версия снова обзавелась солнечной панелью, но очень маленькой что потребовало хитрую схему питания. Это пока самая технологичная плата из всех моих разработок. Размер всего 44х15 мм. Плата вместе с солнечной панелью и аккумулятором полностью прячется внутрь прозрачного корпуса трубки Пито. Разъема USB у неё нет, зато мощность солнечной батереи в 3 раза превышает среднее потребление схемы а значит схема может длительно работать даже с 1% заряда аккумулятора — главное чтобы было светло, а без солнца полностью заряженного аккумулятора хватит на 40 часов.
Четвертая версия снова обзавелась Type C для быстрой, за пару минут, зарядки современного ионистра. Отказ от аккумулятора позволяет эксплуатировать прибор в более жестких условиях от -15 до +65 градусов при гораздо большем сроке службы.
Блютус
Данные о вычисленной скорости TAS отдаются через сервис Location and Navigation service 0x1819. Характеристика TAS не стандартизована и врядли когда-то будет из-за редкого использования. Поэтому сгенерировал свой уникальный UUID 234337bf-f931-4d2d-a13c-07e2f06a0249. Для удобства и более полного соответствия стандарту блютус заполнил Characteristic Presentation Format из которой следует что значение следует рассматривать как INT16 LE, форматировать с точностью до десятых и интерпретировать как км/ч. Для удобства отдельно доступна IAS с UUID 234337bf-f931-4d2d-a13c-07e2f06a0248 и EAS c UUID 73741cd2-a392-427a-af70-6bdb5e0a715b.
Статическое давление и температура доступны для уведомлений через сервис Environmental Sensing также как и в предыдущих проектах Проект FlyBeeper Pressure Sensor, Проект FlyBeeper mini BT. Также доступна величина заряда батареи через 0x180F Battery Service — характеристика 0x2a19 Battery Level.
Режимы работы
Благодаря очень экономичному чипу прибор всегда включен. При отсутствии блютус подключения все датчики находятся в режиме сна, а микроконтроллер отправляет рекламные пакеты по блютус каждые 4 сек, что позволяет обнаружить устройство и подключиться к нему. В таком режиме полного заряда батареи хватит на несколько лет.
При подключении по блютус и подписке на характеристику температуры запускается только измерение температуры, на характеристику давления — запускаются измерения температуры и давления, на характеристику истинной скорости — активируются все доступные датчики.
Еще один технический режим — это режим обновления прошивки по воздуху OTA. Это не сложно сделать самостоятельно, поэтому если при эксплуатации будут выявлены какие-то недостатки то простой для пользователя способ обновления прошивки тут в помощь.
Корпус устройства
Концепт имел монолитную конструкцию из жесткого гомогенного пластика объединяющую трубку Пито, отделение электронных компонентов, настраиваемую систему крепления подвеса, три лепестка хвостового стабилизатора. Конструкция проектировалась с применением симуляции потока и будет адаптироваться по результатам натурных испытаний. В приоритете были: обеспечение жесткости конструкции чтобы выдерживать транспортировку; снижение коэффициента местного сопротивления для увеличения точности на малых скоростях потока; обеспечение системы хранения шнура подвеса и легкость его автоматической размотки при сбрасывании за борт; снижение веса (35 г) для уменьшения эффекта маятника.

После первых испытаний выявилась слабость конструкции из-за необходимости ревизионного отверстия для компонентов. Во второй версии пришлось временно отказаться от солнечной панели в хвостовом отделе из-за слабости крепления. Разработан новый концепт, использующий трубки 20 мм с толщиной стенки 1-1.5 мм в качестве корпуса. Хвостовой стабилизатор съемный, что обеспечит не только ремонтопригодность но и возможность установки устройства на раму дельтаплана.
Третья версия похожа на вторую, но из прозрачной полипропиленовой трубки, что обеспечило возможность установить крохотную солнечную панель внутри корпуса. Однако из-за высоких температур панель пришлось всё-таки вынести наружу, а после летных испытаний место стабилизатора занял волан.
Еще через некоторое время после тестовых полетов антену блютус разместил в передней части, чтобы улучшить связь. Одновременно укоротил до 6 см и добавил разъем Type C для быстрой подзарядки за несколько минут. В таком виде корпус сломать уже проблематично, а волан из нейлона прощает очень грубое обращение. Прибор получился очень компактным — суммарная длина около 11 см.
Программное обеспечение
Что касается поддержки этого датчика летными программами, то на сентябрь 2024 года прямое чтение характеристики TAS делает xcTrack, SeeYou Navigator, LK8000. Реализована альтернативная передача текстовых пакетов в формате LXWP0. Это делает устройство совместимым с большинством летных приложений, принимающих данные по блютус через эмуляцию UART.
Cуществует прогрессивное веб-приложение, которое может быть установлено и работать оффлайн. Оно как минимум имеет возможность отображать данные и писать логи их изменения. Через него тестируется прибор. Через данное web-приложение можно конфигурировать прибор и следить за обновлениями его прошивки. Единственный минус — оно пока не может работать в фоне. Зато есть темный режим для OLED и перевод на 6 языков.
Для калибровки датчика создана отдельная утилита, основанная на измерении времени прохождения датчика по окружности известного радиуса. Вычисляем пройденный путь и делим на время. Для усреднения значений делается несколько оборотов. Количество оборотов должно быть достаточным чтобы не пострадала точность измерения времени и не таким большим, чтобы накопить неточность измерения радиуса окружности. Скорость не слишком маленькая чтобы датчик не опускался к земле уменьшая реальный радиус окружности и не слишком высокая чтобы успевать за один оборот сделать хотябы 3 измерения для компенсации возможного движения воздуха. Оптимально 10-15 секунд при радиусе 1.3-1.5 м и скорости 30 км/ч.
hello, do you think your pitot tube is usable also with hanggliding, having speed between 40 and 100kmh?
thank you. ciao. luca
Yes, of course. I plan to make holder for hangglider.
Hi, have you been able to proceed with the project. I’d be really interested in trying it on a hang glider.
I have several prototypes available to order at a discounted price. You can ask about this in the support chat here
And another question, are you planning a TEC function for using this pitot probe together with one of your vario sensors?
In addition to the differential pressure sensor, TAS has a built-in barometer for measuring static pressure. If you connect it as a vario source, you will get the TEС effect, because This sensor is structurally dependent on speed. This dependency can be configured. But for this I need more data from real flights.